
This article provides the high-level motivations for building the GARP while also introducing the initially-defined subsystems and their core roles and responsibilities. Functional descriptions of the subsystems are provided, and functional diagrams of the Power and Mobility Subsystems are included. This article serves as an entry to the series on the GARP, its design, and […]
Wheeled Robot with CANopen and ROS2 Control: GARP Motor Controller Design
This post discusses some rough requirements, design estimates, and envelop calculations intended to enable implementation of the Alpha stage of the GARP Motor Controller. Some key requirements are discussed, including internal and external interfaces, and rough estimates of loop rates in constituent CAN and PID Controllers are made. Discussion of PID loop tuning via rate […]
Wheeled Robot with CANopen and ROS2 Control: GARP Mobility Subsystem Design
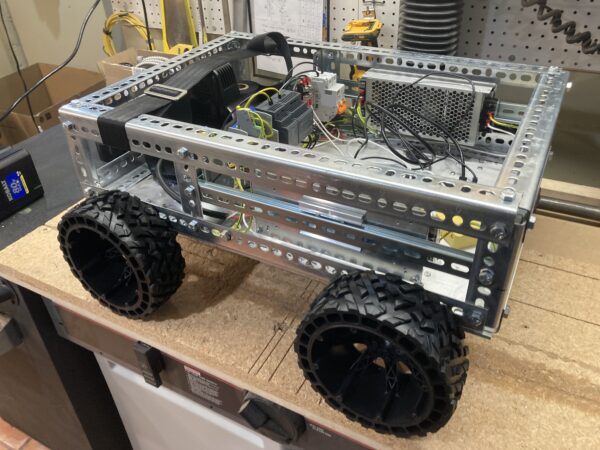
The GARP uses a CAN bus and the CANopen protocol to communicate between a central Command and Data Handler (C&DH) and the wheels’ Motor Controllers. This post captures the highlights of the design process used to make build/buy decisions, select components, and make other design decisions. The post begins with the design principles and assumptions […]